In this study, we present a fast, automated image matching system based on the Kanade-Lucas-Tomasi (KLT) algorithm that, when operated in conjunction with a real-time aerial triangulation (AT), allows the EOs to be determined immediately after image acquisition.

Although KLT shows a promising ability to deliver tie-points to end applications in real time, the algorithm is vulnerable when the adjacent images undergo large displacement or are captured during a sharp turn of the acquisition platform (in our research, an Unmanned Aerial Vehicle or UAV). This can be illustrated as the figure below:
This study proposes to overcome these limitations by determining a good initial approximation for the KLT problem from the EOs observed through GPS/INS. This allows the algorithm to converge to the final solution more quickly.

Integrating the proposed approach into the pyramidal tracking model, the implementation procedure (derived based on the pyramidal implementation from Bouguet, 2000) can be presented as the figure below. The derivation in the figure is based on the translation model, Eq. (3.2).

The related equations are summarized below:

In this research, we also present a mathematical solution to determine the number of depth levels for the image pyramid, which has previously been defined manually by operational personnel. As a result, our system can function automatically without human intervention. For more clarification, please have a look at this document.

In addition, the research work reported here enhances the KLT feature detection to obtain a larger number of features, and introduces geometric constraints to improve the quality of tie-points. This leads to greater success in AT.
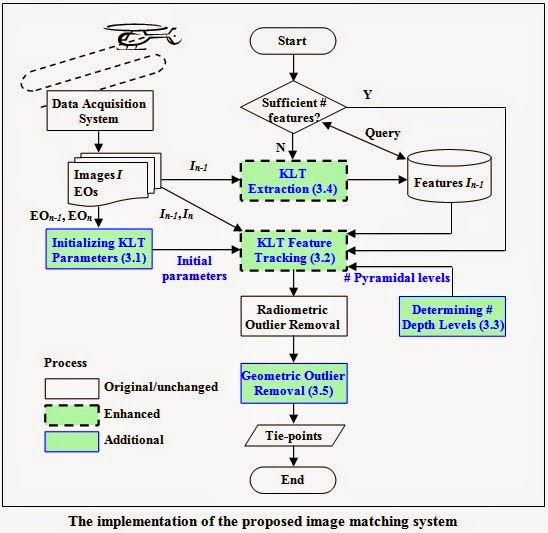
The proposed image matching system used for the experimental testing is developed in C/C++ using the Microsoft Visual Studio 2008 framework. The KLT algorithm adopted for this research study is implemented by modifying the OpenCV library version 1.1 (OpenCV, 2012). Most of the auxiliary functions used to deal with images are also based on the OpenCV library. The implementation of the image matching for real-time georeferencing can be illustrated as the figure below.
The goal of the experiment is to present the improvement in accuracy of the directly observed EOs (EOS1, EOS2 and EOS3) after being refined through a bundle adjustment process given tie-points produced by the proposed image matching. In addition, the experiment measures the accuracy of the adjusted EOs (EOA1, EOA2 and EOA3) when a larger number of tie-points is involved in the computation of AT. The accuracy of the initial EOs is listed in the tables below:



Publications:
1. Tanathong, S., Lee, I., 2014. Translation-based KLT tracker under severe camera rotation using GPS/INS data. IEEE Geoscience and Remote Sensing Letters, vol. 11, no. 1, pp. 64-68. [LINK][Sourcecode]
2. Tanathong, S., Lee, I., In Press. Using GPS/INS data to enhance image matching for real-time aerial triangulation. Computers & Geosciences. [LINK]
3. Tanathong, S., Lee, I., Submitted for publication. Accuracy assessment of the rotational invariant KLT tracker and its application to real-time georeferencing. Journal of Applied Remote Sensing. (Revision in progress)
4. Tanathong, S., Lee, I., 2011. A development of a fast and automated image matching based on KLT tracker for real-time image georeferencing. Proceedings of ISRS, Yeosu, Korea. (Student Paper Award)
5. Tanathong, S., Lee, I., 2011. An automated real-time image georeferencing system. Proceedings of IPCV, Las Vegas, USA.
6. Tanathong, S., Lee, I., 2010. Speeding up the KLT tracker for real-time image georeferencing using GPS/INS data. Korean Journal of Remote Sensing, vol. 26, no. 6, pp. 629-644.[LINK][PDF]
7. Tanathong, S., Lee, I., 2010. Towards improving the KLT tracker for real-time image georeferencing using GPS/INS data. Proceedings of 16th Korea-Japan Joint Workshop on Frontiers of Computer Vision, Hiroshima, Japan.
8. Tanathong, S., Lee, I., 2009. The improvement of KLT for real-time feature tracking from UAV image sequence. Proceedings of ACRS, Beijing, China.

No comments:
Post a Comment