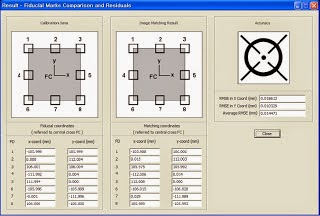
The main interior orientation parameters (IO) or intrinsic camera parameters are (1) focal length and (2) principle point coordinates. The program I am presenting here is to find the fiducial marks in which we can further reveal the principle point positions.
For the implementation, the cross correlation coefficient is employed to search for the fiducial marks. This can be said as a template matching problem. The application screens are shown below:

The program is developed using the C/C++ language using MS Visual Studio .NET 2003. I have not used any library. The image processing is done in pixel-wise using the class CImage that comes with MFC.
This program is part of my assignment for the Digital Photogrammetry subject (2010, Summer).
[Sourcecode][Executable][Assignment Report]
The source code is now available on Github: https://github.com/stanathong/fiducial_mark_detector.

No comments:
Post a Comment